
Results of TurtleBot Fleet Management AMOS Project with Sick AG (Video and Report, Summer 2022 Project)
This project is one of eight Scrum projects with industry partners that were part of the Summer 2022 AMOS Projects. Below please find the video (you may also like the other videos) and the project summary which details the final result of the project. We run these projects every semester, so please be in touch if you would like to motivate one of your own!
Project Summary
| Project name | TurtleBot Fleet Management |
| Project mission | The mission was to develop three key components namely, a fleet management system, an on-robot navigation system and a user interface along with interfaces to have an intra-component communication. The fleet management system has to manage TurtleBots (AGVs) on a defined circular course. The TurtleBots need to communicate with the fleet management using MQTT & VDA5050 and should navigate in the available physical space to deliver small goods from a home station to a particular station on a pre-planned route and reorient themselves when going off-course. An interactive user interface should provide status information for every robot. |
| Industry partner | Sick AG |
| Team logo |  |
| Project summary | Our fleet management can control a fleet of robots and deliver goods from point A to B without human interference. We have created a good looking and easy to use web-based user interface for submitting driving orders and monitoring of the TurtleBots. We implemented the navigation along virtual lines based on information from the Sick Lidar sensor on the TurtleBots. But a picture speaks more than a thousand words, especially in a hardware project, so have a look at our AMOS demo day video. |
| Project illustration | Our architecture and tech stack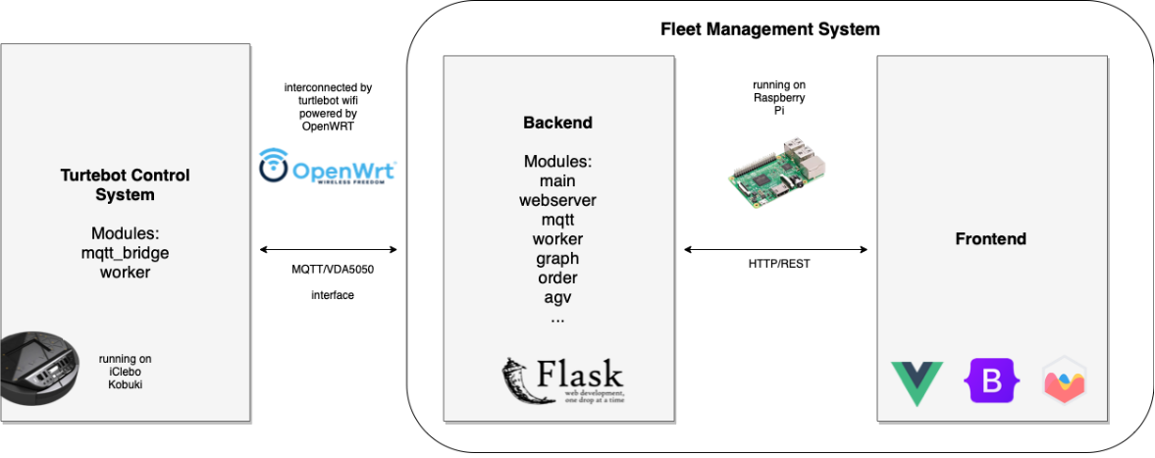 Our user interface 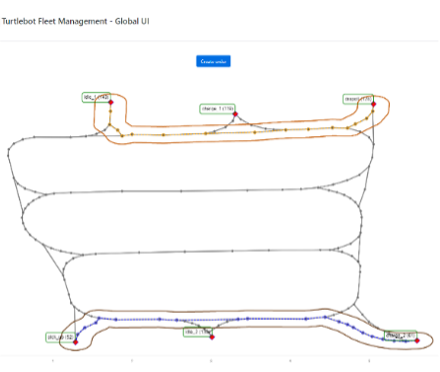 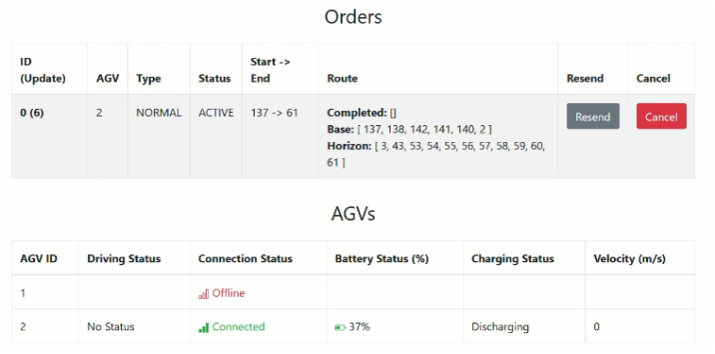 |
| Team photo |  |
| Project repository | https://github.com/amosproj/amos2022ss03-turtlebot-fleet-management |